CREATIVE ALGORITHMS AND SENSOR EVOLUTION LABORATORY
For a robot to collaborate with people or help people in a factory or daily life, a set of functional requirements should be realized technically. We define this as 3 axioms of CASELAB robot.
VIABILITY
INTERACTION CAPABILITY
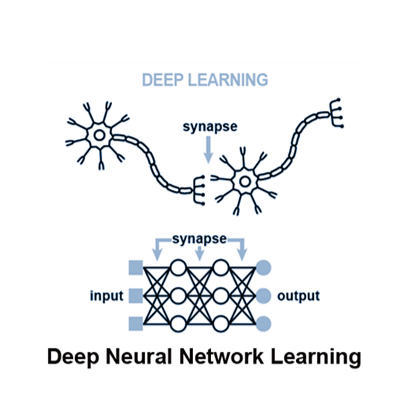
LEARNABILITY
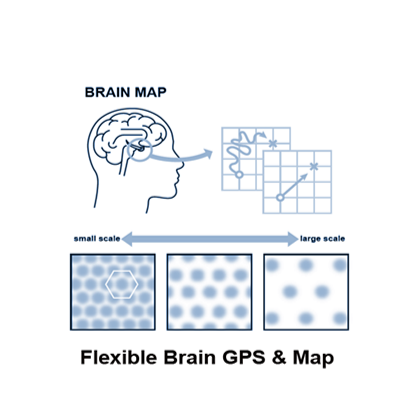
It is amazing to learn the way nature solves problems.
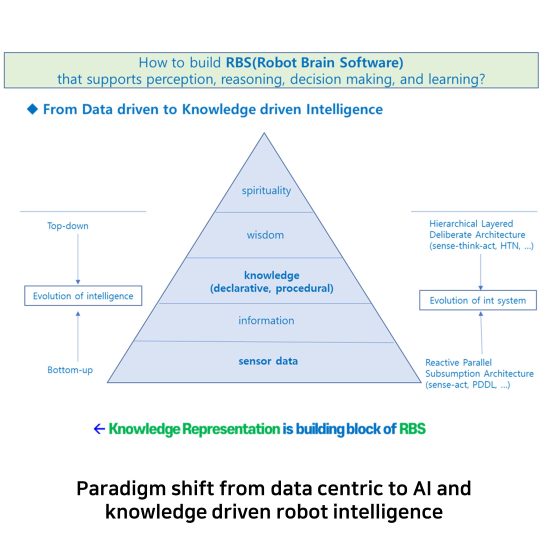
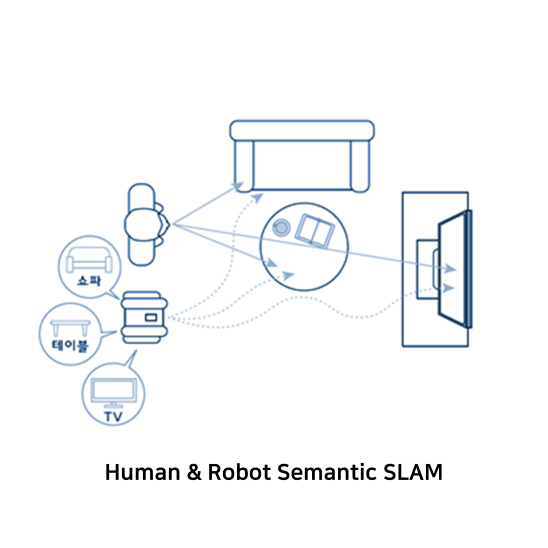
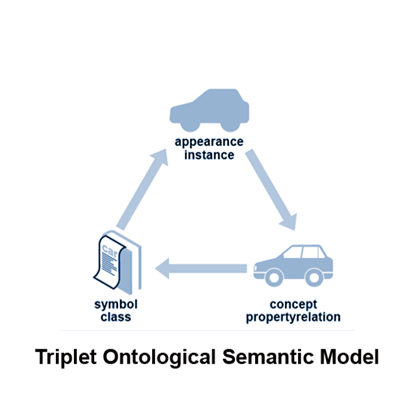
Our new semantic technology framework learns its surrounding model combining sensor data and its domain specific knowledge as human does and uses it for autonomous navigation and map building, object and place recognition, obstacle avoidance, and manipulation.
COPYRIGHT ⓒ CASELAB.ALL RIGHTS RESERVED.